

文|有界UnKnown 錢江
編輯|山茶
11月底,黃仁勛在香港科技大學的博士學位授予儀式上,將人形機器人與汽車、無人機并肩列為未來會實現大規模量產的三種機器人。
這已經不是黃仁勛第一次在公開場合“力挺”人形機器人,在今年3月份的英偉達GTC大會上,黃仁勛曾與1X Technologies、Agility Robotics、Boston Dynamics、Figure AI、宇樹等9個人形機器人同時登臺,發布英偉達人形機器人通用基礎模型——Project GR00T。
▲黃仁勛在GTC大會上 直播截圖
在之后的多個場合里,黃仁勛都向外界傳遞著相同的觀點:人形機器人將會成為人類生活里不可缺少的伙伴,它終將成為和汽車一樣的主流產品。

在關于人形機器人未來在人類生活中重要地位的看法上,黃仁勛也與馬斯克不謀而合。
馬斯克也曾在2024年特斯拉股東大會上表示,未來“全世界每個人都會想要一個機器人 ”,他認為人形機器人和人類的比例,至少是2比1,甚至能到1比1,未來會有100億甚至200億、300億臺人形機器人。在一次采訪中,黃仁勛也坦言,“100年后大街上將到處都是人形機器人”,馬斯克則在X上默契地回復,“人形機器人普及程度將是汽車10倍”。

▲馬斯克在X平臺上與黃仁勛互動 截圖
黃仁勛也幾乎成為除了馬斯克之外,最賣力為人形機器人站臺的科技大佬。但和馬斯克更側重于造出人形機器人本體、并將其應用于特斯拉的生產和勞動力補給上不同,黃仁勛更專注于做人形機器人的技術服務商。
英偉達機器人和邊緣計算副總裁Deepu Talla在東京的一次會議上直言,英偉達瞄準的是一個由“數十萬”家機器人制造商組成的分散市場,而不是由少數幾家主要參與者主導的集中式智能手機市場,“我們為機器人提供平臺,而不是制造機器人”。
那么,英偉達究竟想要做一個什么樣的機器人平臺?
01 打造人形機器軟件生態
2021年,波士頓動力曾發布一則Atlas的跑酷視頻,在全球范圍內第一次掀起了人形機器人的狂熱。
在這則視頻中,Atlas可以輕而易舉地在各種形狀和坡度的踏板之間跳躍、奔跑、上下階梯。但很多人都不知道,在這則驚艷世界的視頻背后,是Atlas十多年如一日的訓練。
機器人和人一樣,要學會走路也需要經過無數次的訓練,通過積累足夠多的數據才能實現。對于早期的人形機器人而言,積累數據沒有捷徑,只能通過一次又一次的跌倒來完成。
所以在Atlas早期的訓練視頻中,我們會看到它身邊時刻都跟隨著好幾個工作人員,以便在它“倒下”的時候及時檢查零件。
但這個過程顯然太過漫長,不利于人形機器人快速發展。為了提高人形機器人的訓練效率,人們在AI、大數據和云計算等前沿技術的基礎上,建立了一套利用虛擬世界對人形機器人進行訓練的方法。
通常來講,人形機器人的訓練,會經歷一個從Real2Sim(真實到虛擬)到Sim2Real(虛擬到真實)的過程。也就是先從真實環境采集數據投入到仿真環境,讓機器人在仿真環境里做充分學習和訓練,再將其拉到現實世界里歷練。
這個過程由于有相當一部分在虛擬環境中進行,因此不僅可以加快訓練速度,還可以降低硬件損耗。
英偉達在人形機器人領域的第一個布局,就是搭建一套仿真訓練設施,它具體包括人形機器人仿真訓練場需要使用的虛擬場所構建、人形機器人與環境互動的仿真訓練,以及人形機器人控制規劃學習的仿真訓練。
它們分別對應著虛擬協作和仿真平臺Omniverse、用于機器人行為仿真的平臺Isaac Sim、用于機器人算法訓練與優化的平臺Isaac Lab。
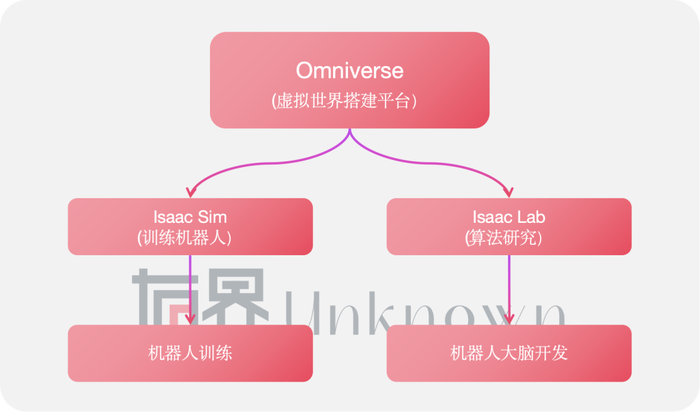
▲英偉達人形機器人軟件生態,有界UnKnown制圖
用一個形象的比喻,Omniverse就像一座城市,這座城市里有高樓林立的大廈、車水馬龍的道路以及人類生活所需要的一切基礎設施,而人形機器人就像生活在這座城市的人類一樣,他們在城市之中穿梭、從事勞動活動。
Isaac Sim就像是Omniverse這座城市里的健身房一樣,人形機器人需要在這個健身房不斷與各類運動器材進行磨合,這就對應著人形機器人與環境交互的能力訓練,它們需要了解路徑規劃,比如怎么樣才能正確抵達所需要的運動器材面前,并且了解每一種器材的使用方法,比如看到啞鈴知道是用來抓取的、看到跑步機就知道是用來跑步的。開發者使用Isaac Sim來測試機器人在不同環境中的表現,不需要實際硬件即可驗證機器人的動作和決策。
Isaac Lab就像Omniverse這座城市里的圖書館一樣,人形機器人需要在這座圖書館之中不斷更新知識,它主要聚焦于算法開發與訓練,為機器人提供決策和控制能力,允許開發者在虛擬環境中開發、測試和優化機器人控制和智能算法。
▲英偉達GTC 2024大會,Isaac Lab環境里的Digit
所以,Omniverse是一個讓機器人學習如何更好適應現實世界的地方,在這樣的虛擬環境中,機器人可以進行智力訓練和動作訓練。基于Omniverse,英偉達開發了機器人開發仿真平臺和參考應用程序Isaac Sim和開源的模塊化機器人學習框架Isaac Lab。
總的來說,英偉達這一套人形機器人軟件生態,能夠為機器人數據訓練提高效率、降低成本,讓機器人可以不必在復雜的硬件環境中磕磕碰碰,在進入真實環境之前,能夠先在虛擬世界里“練兵”。
在今年3月份的英偉達GTC大會上登臺的9家人形機器人,就是這套生態的首批“種子用戶”。
在這樣一套仿真機制的配合之下,英偉達發布了具身智能通用大模型——Project GR00T,與迪士尼動畫《銀河護衛隊》中的小樹人格魯特同名,寓意著人形機器人可以如動畫中的格魯特一樣擁有超凡的力量。
GROOT使得機器人能夠理解和處理自然語言,并且具備多模態感知能力,即它能夠通過視覺、聽覺等多種感官輸入來進行信息處理。
但只做軟件生態,還無法滿足英偉達這樣一家以芯片起家的公司的野心。
02 為人形機器人造“芯”
對于英偉達來說,公司的根本一直都是硬件,是GPU。
因此在人形機器人領域,黃仁勛也同樣希望能夠延續英偉達在游戲、在AI、在智能汽車領域的神話,做出遙遙領先的芯片。
一個人形機器人也是由多個“芯片器官”組成的,每個芯片負責不同的任務,讓機器人能夠像人一樣思考、感知、行動、交流和生活。人形機器人需要6-8種不同類型的芯片,包括中央控制、運動、視覺、語音、傳感器和通信處理芯片,以完成全身調度、環境感知和與人類交流。

▲人形機器人所需要的芯片,有界UnKnown制圖
而這些芯片中,有兩類是比較關鍵的。一類是控制機器人運動路線的芯片,另一類是幫助機器人思考的芯片。
以特斯拉的人形機器人Optimus為例,這兩塊芯片分別使用的是特斯拉汽車上使用的FSD自動駕駛芯片,以及特斯拉訓練自動駕駛而專門開發DOJO芯片。
在自動駕駛芯片方面,英偉達一直遙遙領先,其最新發布的DRIVE AGX Thor可提供高達2000TFLOPS的算力,是目前算力最高、效果最好的自動駕駛芯片。
而英偉達的人形機器人芯片就與Thor同出一源。
今年11月中旬,華爾街日報曾報道,英偉達計劃在2025年推出面向人形機器人的專用芯片Jetson Thor,在快速增長的機器人行業中占據一席之地。
Jetson Thor具備高性能AI推理能力,支持運行如GR00T等大型多模態生成式AI模型,采用英偉達最新的Blackwell架構,并配備Transformer引擎,可以支持人形機器人在視覺、語音和觸覺等多模態感知下的交互,增強其與人類的自然交流能力。這也是英偉達首次公開宣稱專門為人形機器人打造的芯片平臺。
Jetson是英偉達旗下專為 AI 應用設計的緊湊型計算機平臺,其芯片除了機器人之外,還應用在無人機、智能家居、醫療設備和工業自動化等場景。
Jetson平臺最早可以追溯到2014年,這也是英偉達在機器人領域布局的開始。
這一年,物聯網、邊緣計算、人工智能和機器人技術開始嶄露頭角,市場對與之匹配的芯片需求也在持續擴大。同時,這一年人形機器人也開始投入初期應用。軟銀在這一年推出Pepper,它是全球首款能夠識別和回應人類情感的商用人形機器人;法國Aldebaran Robotics公司開發NAO機器人,開始投入教育領域,幫助學生學習編程、科學和數學。
也是在這一年,英偉達上線Jetson TK1芯片,它具備更強的圖形處理能力和AI處理能力,采用了基于Kepler架構的GPU,并結合了ARM Cortex-A15 CPU,適用于低功耗設備。雖然它并不是直接針對人形機器人,但卻為人形機器人處理復雜的視覺感知和計算提供了硬件支持。
隨后,幾乎每隔一兩年,英偉達Jetson系列都會發布新產品,其中Jetson Xavier 和Jetson Orin相關系列對人形機器人的發展提供支持,并且它們清一色都是推理芯片。
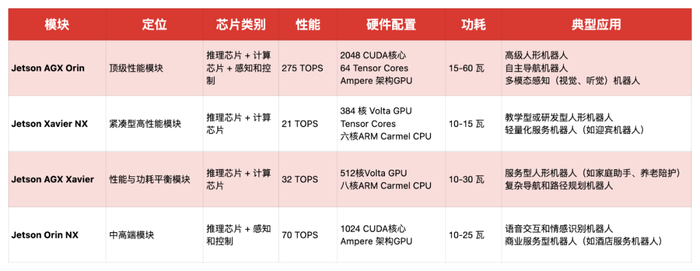
▲英偉達Jetson芯片應用介紹
雖然Jetson AGX Xavier和Jetson Orin系列適用于機器人領域,但并非專門為人形機器人而設計,它們同樣適用于無人機、自動駕駛等產品。
而計劃于2025年上線的Jetson Thor則是專為人形機器人打造的,根據英偉達官方表示,Jetson Thor能夠執行復雜任務,并與人和機器安全、自然地交互,它采用英偉達最新的Blackwell架構,并配備Transformer引擎,可以支持人形機器人在視覺、語音和觸覺等多模態感知下的交互,增強其與人類的自然交流能力。
結語
人形機器人并非黃仁勛首次做趨勢性預測的領域,在黃仁勛的輝煌歷史中,曾連續兩次“押對寶”。
1999年,中央處理單元(CPU)仍然是計算機系統的核心,雖然圖形處理的需求不斷增長,但CPU主要負責所有的計算任務,包括圖形渲染。當時,雖然圖形顯卡市場也在發展,但多數顯卡只能提供基礎的2D圖形渲染,并且較少具備3D加速能力。
黃仁勛卻在這一年推出GeForce GPU系列,發布GeForce256,成為世界上第一款GPU,也是首個支持硬件加速的實時3D圖形渲染的圖形處理單元。
它給游戲玩家帶來了前所未有的順暢體驗,根據“英偉達中國”紀念1999年這款GPU的相關文章描述,與GeForce256結合的游戲《虛幻競技場》是首批擁有逼真反射效果的游戲之一,在發布的第一年內,便售出了超過100萬份。[1]
2006年,黃仁勛發布并行計算平臺和編程模型“CUDA”,使得GPU具備處理通用計算任務的能力,CUDA的發布被夸張地形容為一場“災難”。如果將GPU形容為一個擁有上千個工人的工廠,可以驅動工人同時處理成千上萬的圖形像素,那么,CUDA就像這群工廠工人的管理系統,它不僅能做圖像渲染,還能做科學計算、分析大數據、訓練AI模型。
這兩次,黃仁勛都贏在芯片上。
那么,在人形機器人領域,除了做仿真訓練平臺,黃仁勛為人形機器人這個“新物種”造的“芯”,能讓英偉達再次站在新的時代高點嗎?
也許,不到100年,就能看到大街上到處行走的人形機器人。